学习极几何的一些笔记
极几何
于是在多视图几何中存在以下几个关键问题
- 摄像几何:从一张或者多张图像中求解摄像机的内外参数
- 场景几何:通过两张至多张图片寻找3D场景坐标
- 对应关系:已知一个图像中的
点,如何在另一个图像中找到对应的 点
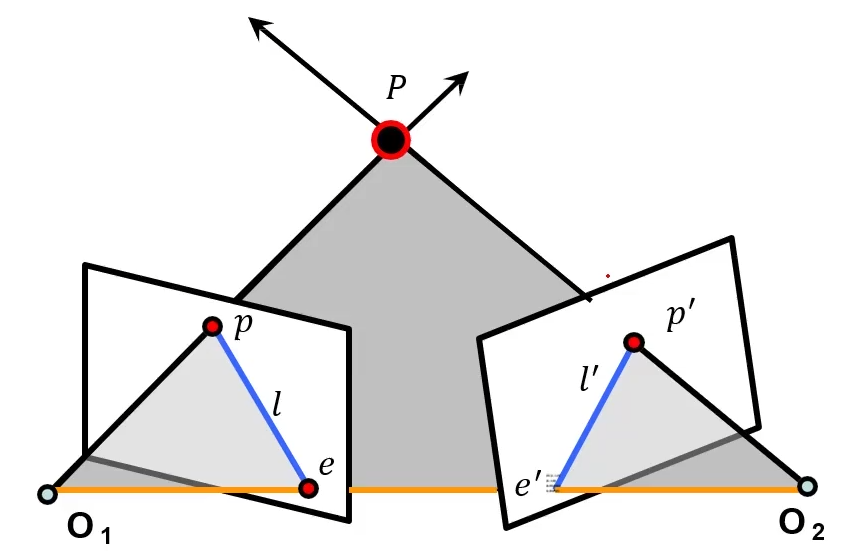 如图:
如图:
- 极平面:过点
, 与 的平面 - 基线:
与 的连线 - 极线:极平面与成像平面的交线
- 极点:基线与成像平面的交点
极几何的特例:平行视图(常见双目立体、VR):
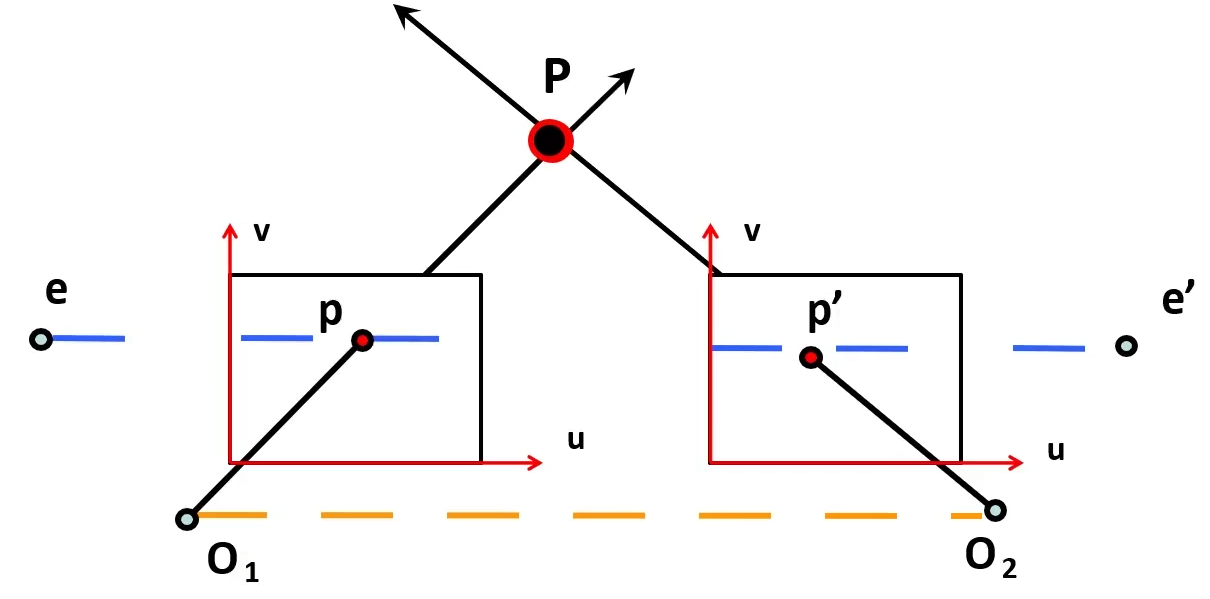
- 两个图像平面平行
- 基线平行于图像平面,极点
和 位于无穷远处 - 极线平行于图像坐标系的
轴
本质矩阵
对于规范化相机,图像
于是可以求得一个垂直于极平面的向量
对应的极线是 对应的极线是 与 是奇异的(秩2) 是5个自由度(三个旋转+三个平移, 去掉一个自由度)
基础矩阵
这个为正常透视相机下的点
常见的基础矩阵估计方法八点法,归一化八点法
单应性矩阵
空间平面在两个摄像机下的投影几何
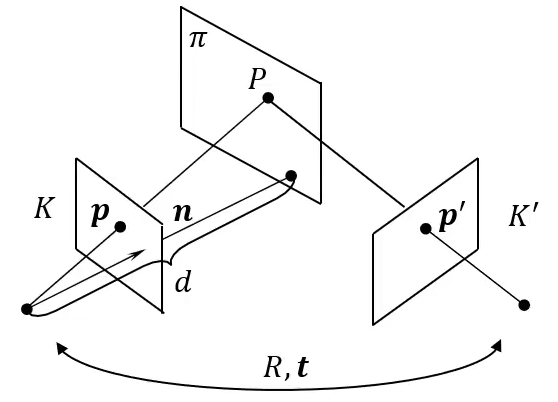
如图单应性矩阵推导已知第一个摄像机的内参矩阵
平面
约束关系
基础矩阵建立点和极线的对应关系
单应矩阵建立点和点的对应



